The Canadian Planetary Emulation Terrain Energy-Aware Rover Navigation Dataset
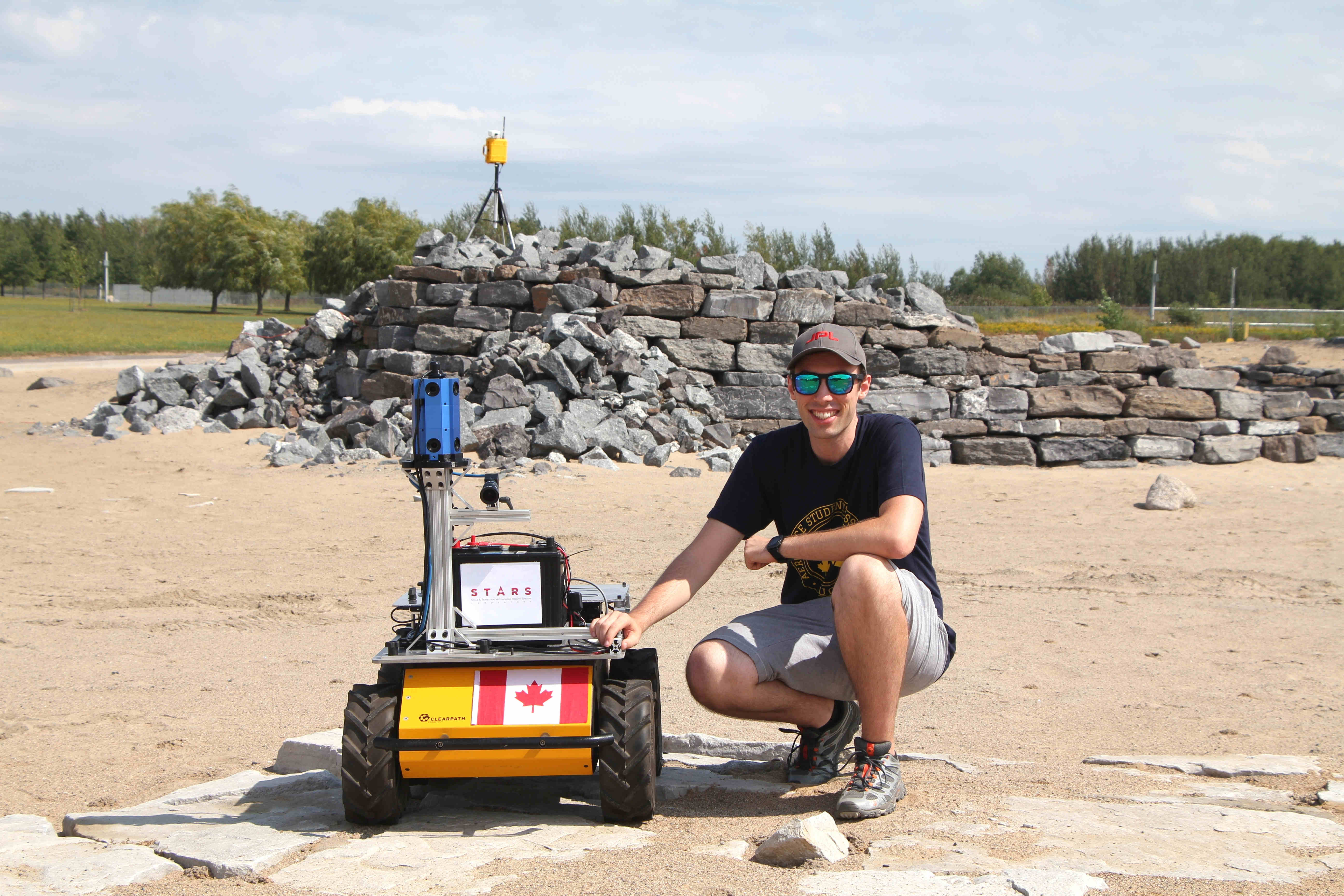
As part of my research in long-term and resource-aware planetary navigation at the University of Toronto, our laboratory has put together a dataset collected by a ground rover equipped with a suite of sensors at the Canadian Space Agency’s Mars Emulation Terrain. It includes driving power consumption, solar irradiance, omnidirectional stereo imagery, georeferenced aerial maps of the environment, and more.
This work was submitted for publication in the International Journal of Robotics Research IJRR. Links to the dataset itself and (soon) the journal article can be accessed in my publications list.