Projects
I’ve been involved in personal, academic and professional projects related to robotics for as long as I can remember.
Some of these projects are listed below.
I’ve been involved in personal, academic and professional projects related to robotics for as long as I can remember.
Some of these projects are listed below.
My PhD research with the STARS Laboratory at the University of Toronto consists in exploring ways to enable planetary rovers to drive autonomously on very long distances while having an awareness of the impact of navigation on their resources (such as energy levels). Long-term autonomy in planetary environments (such as the surface of the Moon or Mars) will be necessary in the future as the interest of sending more rovers with more ambitious driving requirements to those destinations just keeps increasing.
This work is performed in collaboration with NASA’s Jet Propulsion Laboratory in Pasadena, California. I am very fortunate to have spent most of my time there last year under the (co-)supervision of Dr. Masahiro Ono, with whom I will continue to collaborate in the following months.

As part of my research in long-term and resource-aware planetary navigation at the University of Toronto, our laboratory has put together a dataset collected by a ground rover equipped with a suite of sensors at the Canadian Space Agency’s Mars Emulation Terrain. It includes driving power consumption, solar irradiance, omnidirectional stereo imagery, georeferenced aerial maps of the environment, and more.
This work was submitted for publication in the International Journal of Robotics Research IJRR. Links to the dataset itself and (soon) the journal article can be accessed in my publications list.

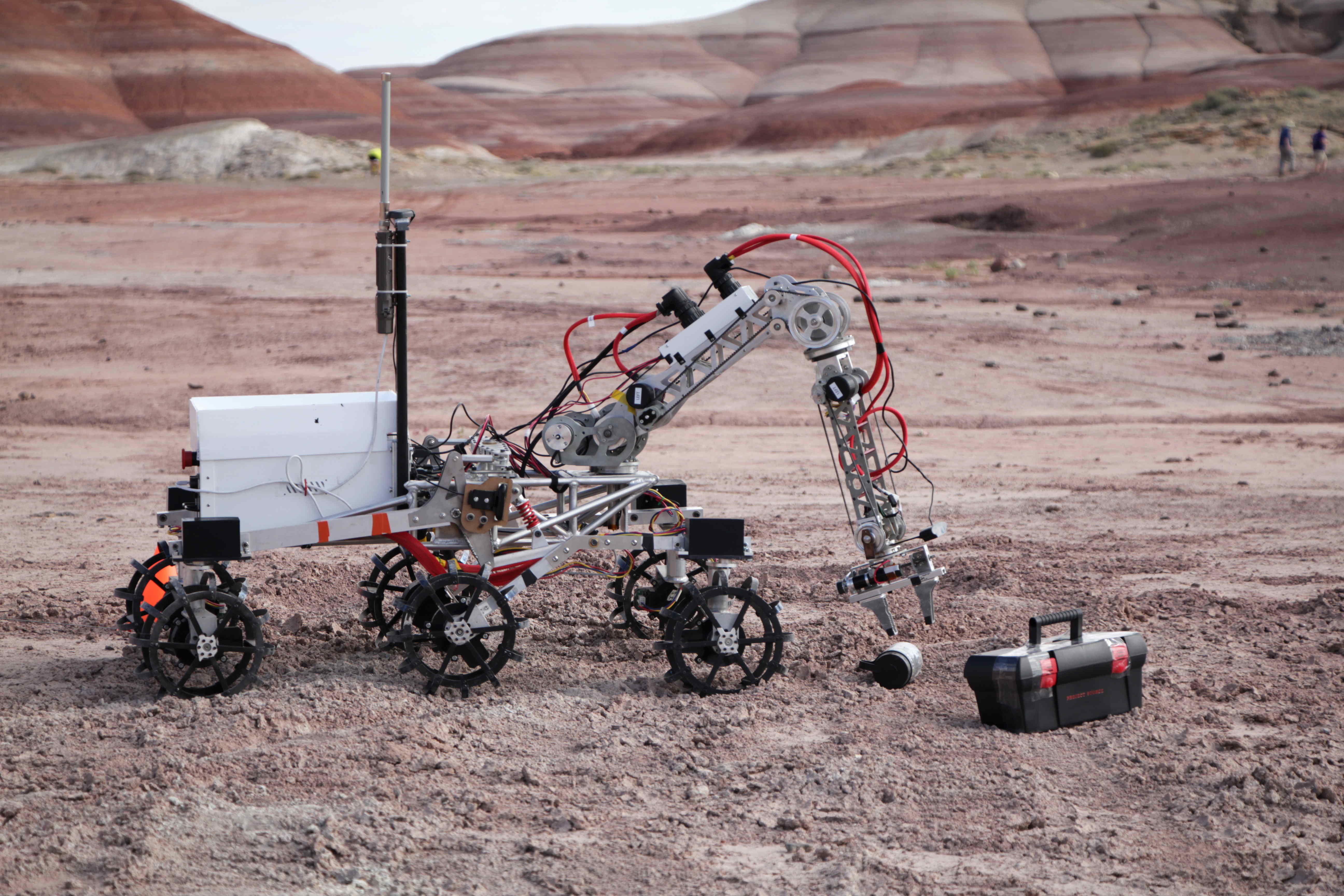
Early during my undergraduate studies, I started the McGill Robotics Mars Rover Team to share my desire to design planetary rovers to compete internationally. In just one year, the team grew from one member (myself) to more than 50 active students from different engineering and science backgrounds, becoming one of McGill University’s largest engineering design teams.
Over three years under my supervision, the team has designed, built and deployed three different planetary rovers in analogue test environments and finished third internationally for two years in a row.
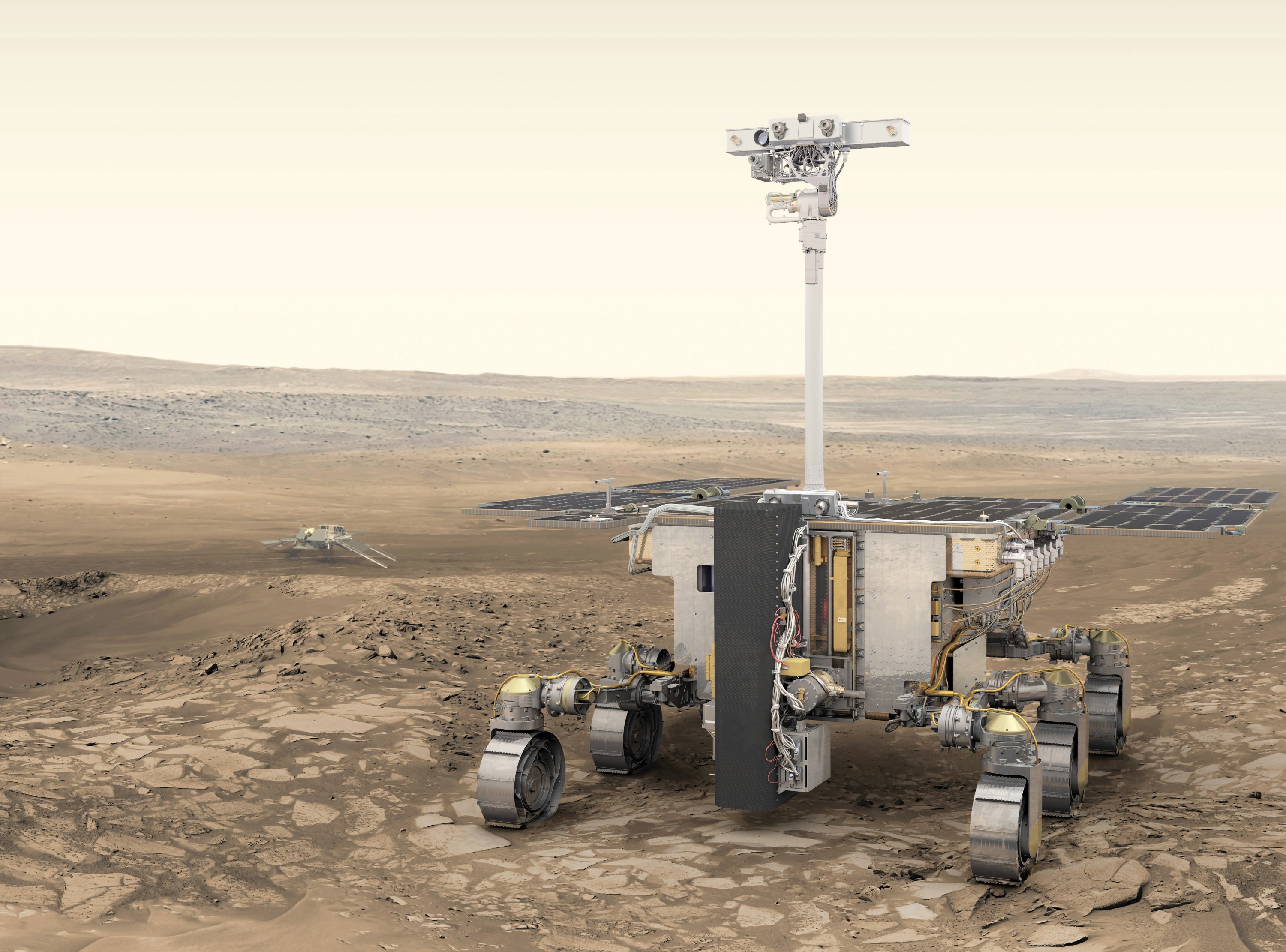
For a whole summer, I joined the team at MDA working on BEMA, the locomotion submodule of the European Space Agency’s Rosalind Franklin (formerly ExoMars) rover. This was a great introduction to the hardware necessary to simulate the space environment, clean rooms and systems engineering processes in the space industry.
My main internship objective consisted in creating an environmental test procedure and designing appropriate test rigs to assess the performance of wheel actuators when partially immersed in Martian soil.
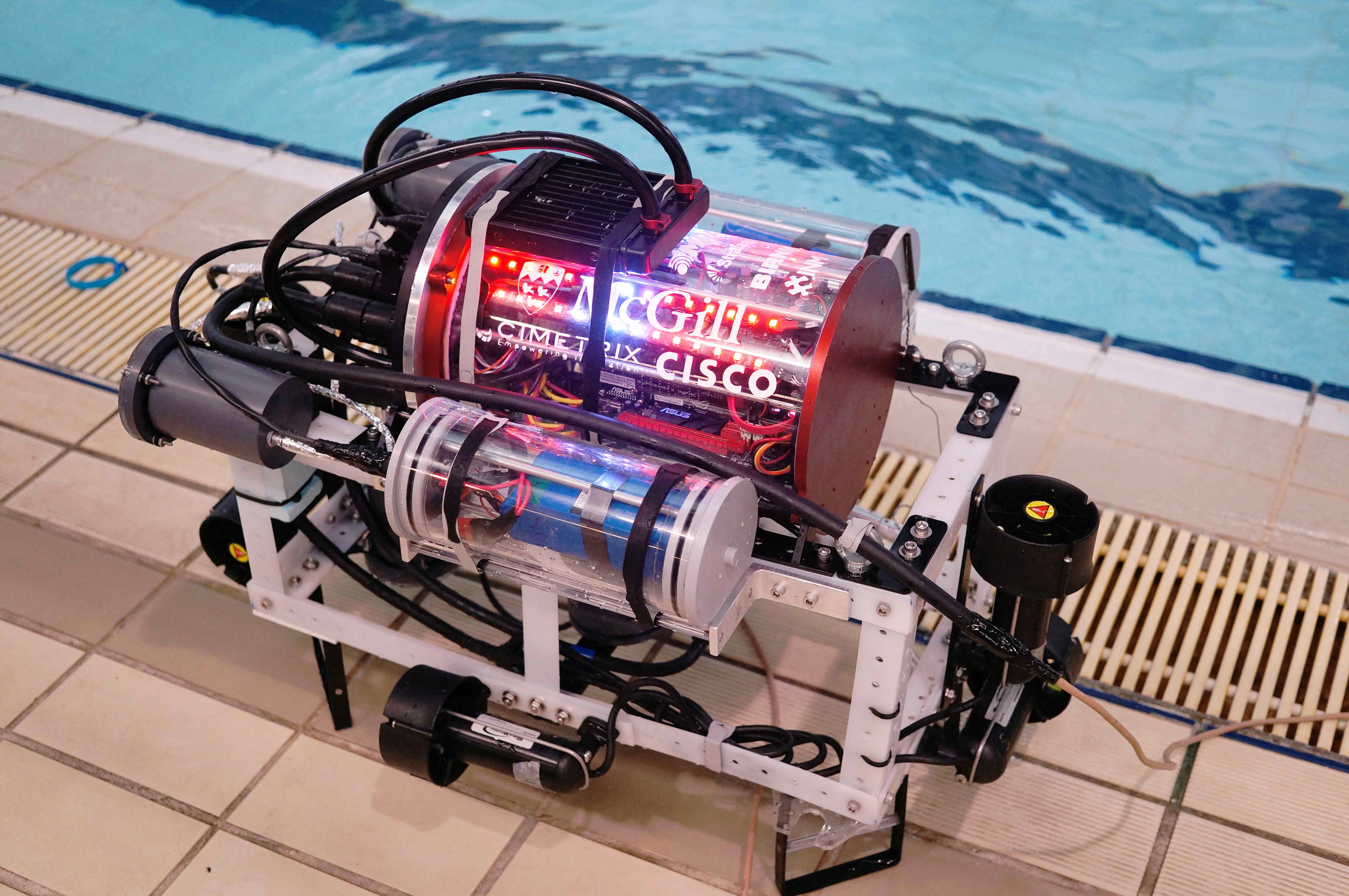
During my first year as an undergraduate student at McGill University, I joined the newly-created McGill Robotics team developing an Autonomous Underwater Vehicle (AUV). I was first tasked to design the grippers of the robot, and was later part of the robot’s sub-systems and full-system testing group. Our team successfully competed in the 2014 RoboSub Competition in San Diego.